信号与系统实验2:信号的矩形脉冲抽样与恢复
这是信号与系统的实验报告。我信号与系统总共就扣了几分,也不知道是期末扣的,还是实验扣的。即使全是实验扣的,这实验也算做的挺好的。于是把报告发出来给大家参考。 这是第二个实验,信号的矩形脉冲抽样与恢复
一、实验结果展示
各频域图像
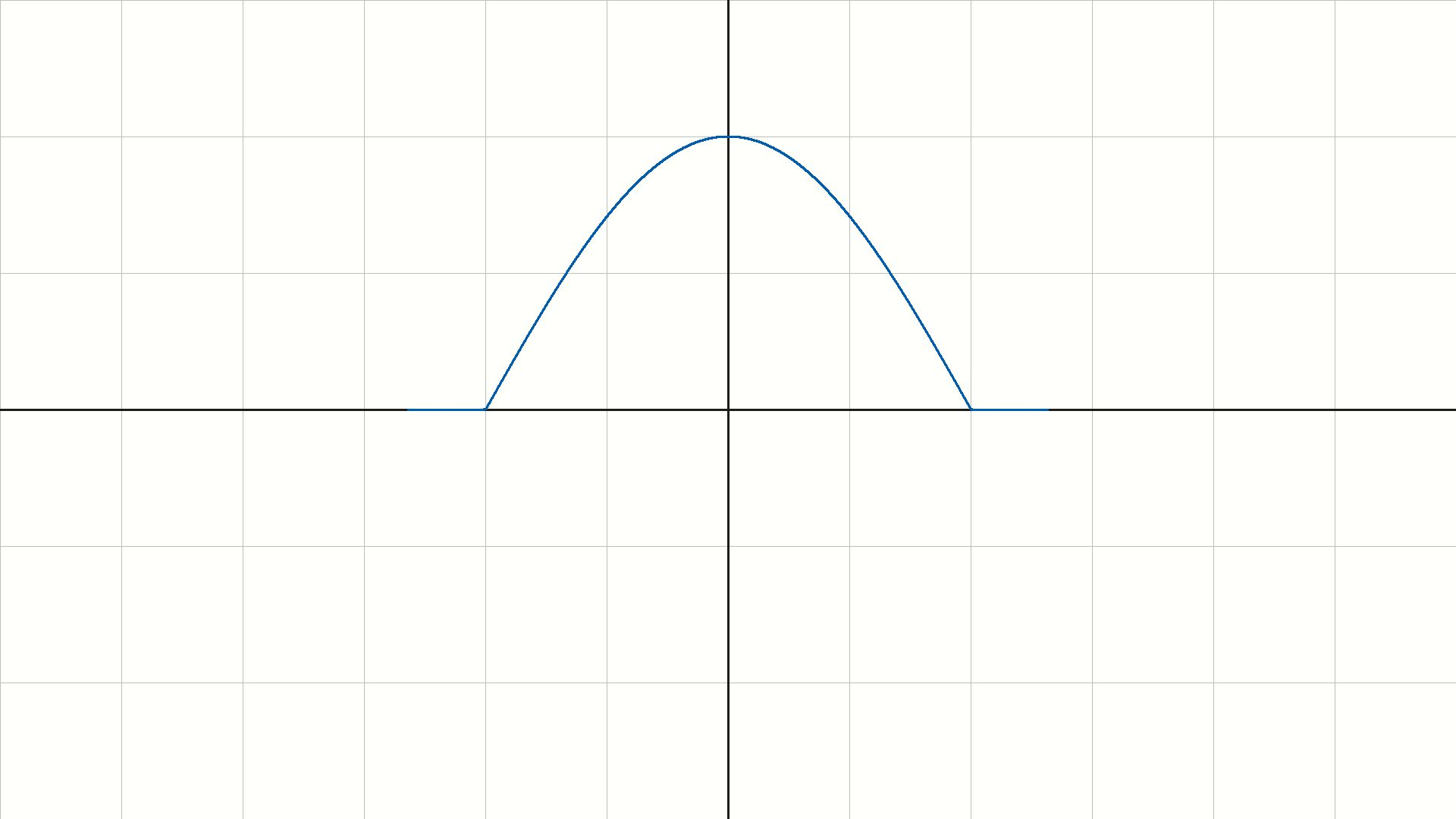
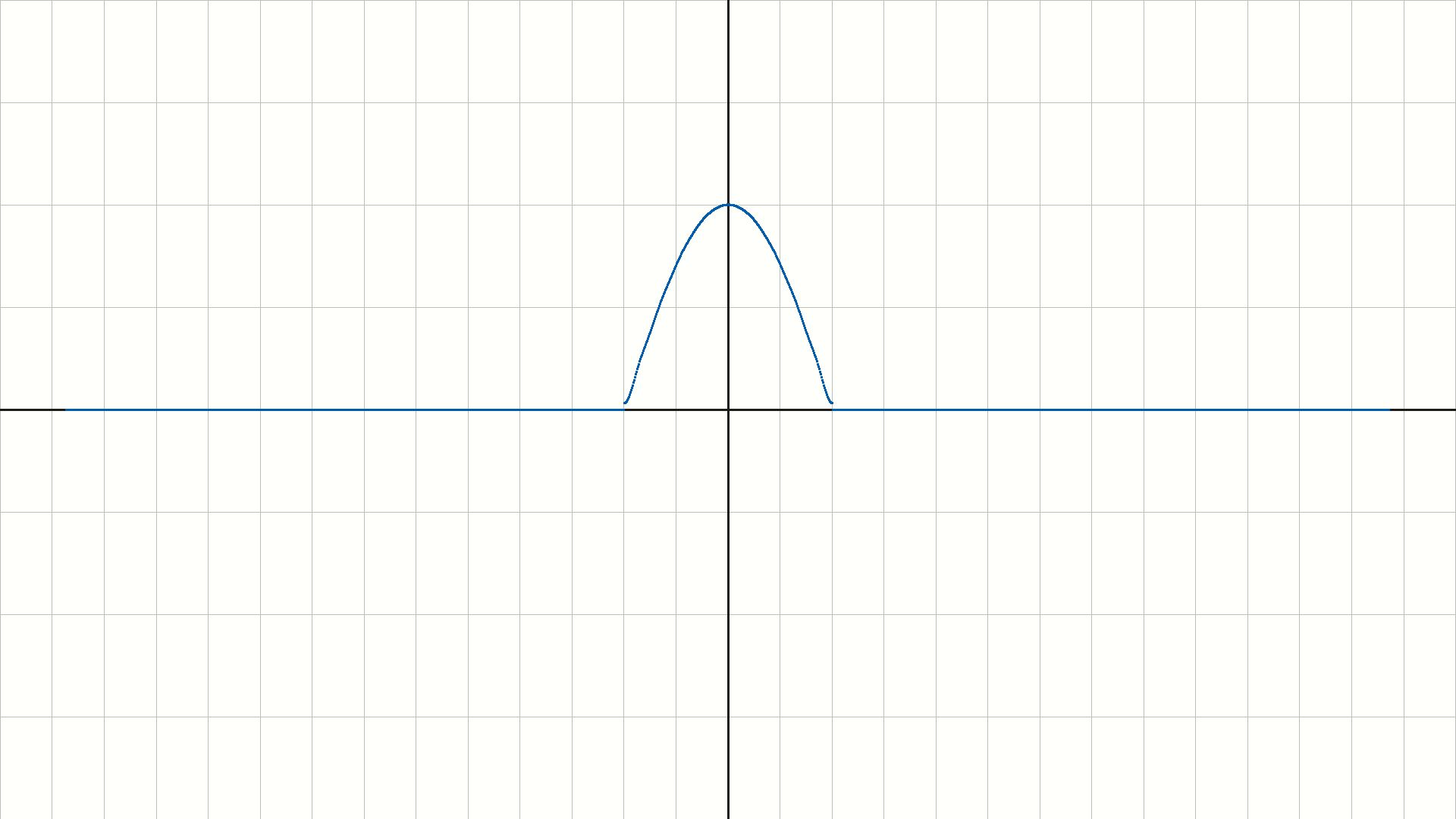
\(F(\omega)\)原始频域图像
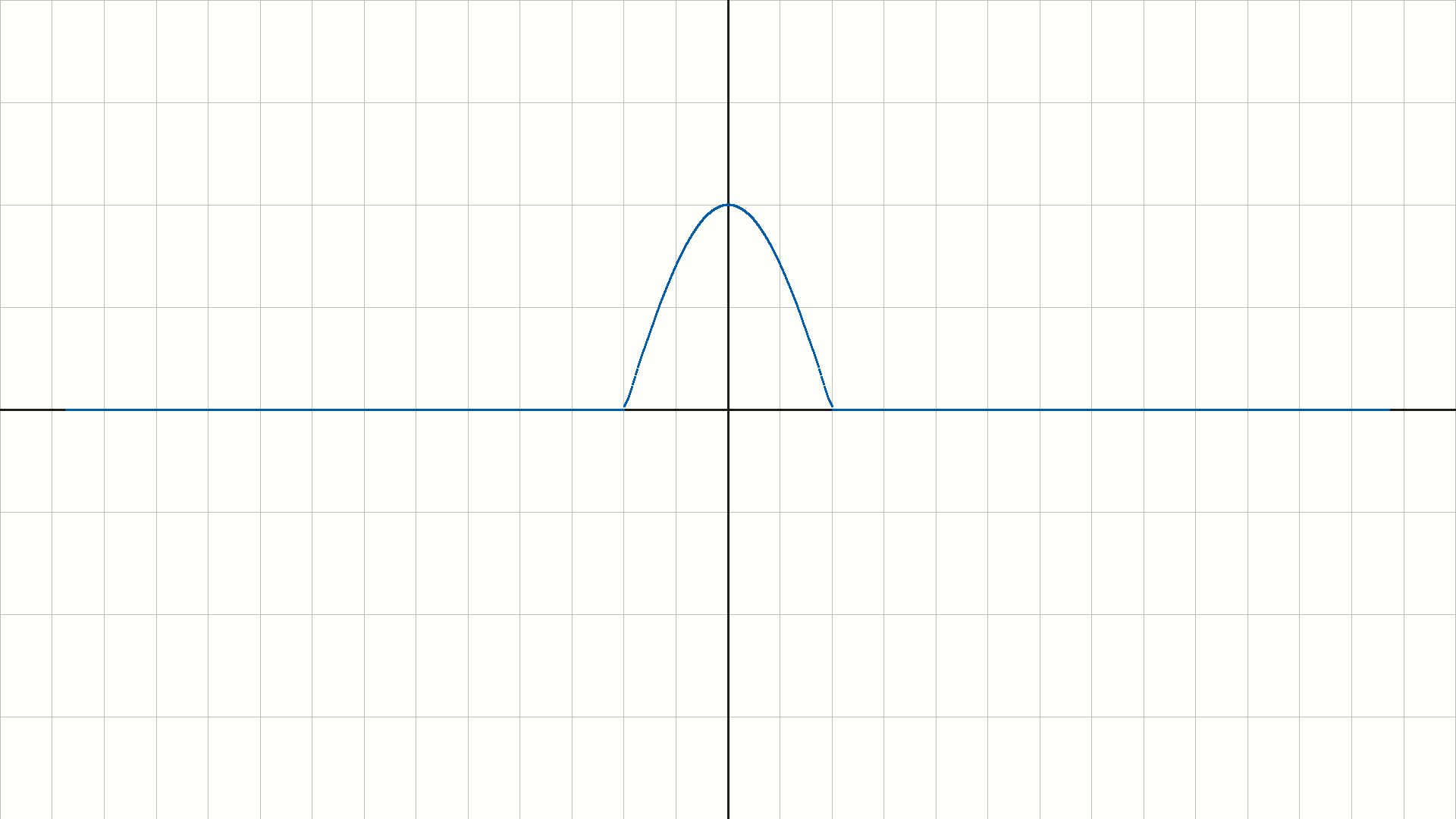
\(0.2\text{Hz}\)采样频域图像

\(0.5\text{Hz}\)采样频域图像
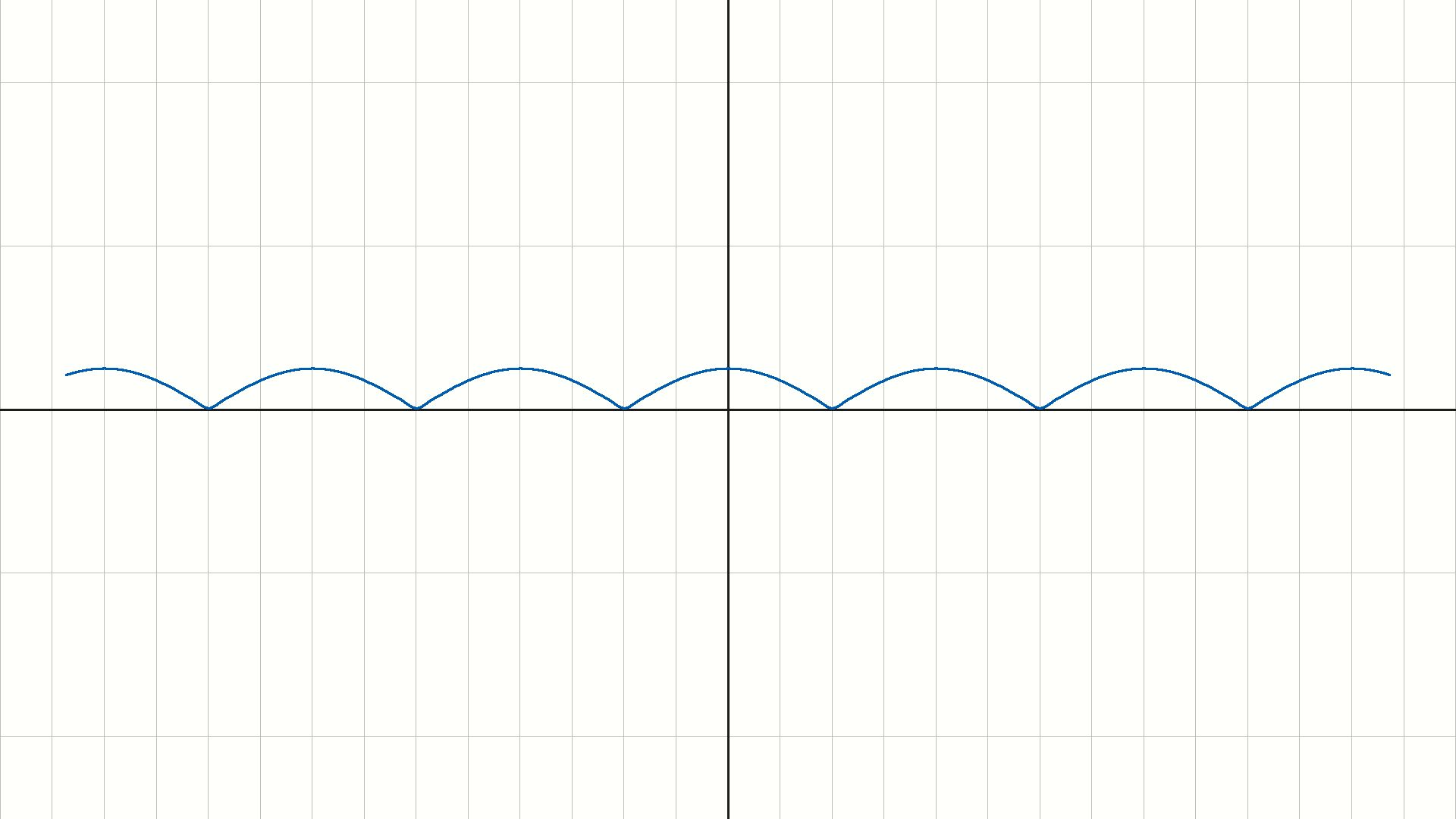
\(1\text{Hz}\)采样频域图像:
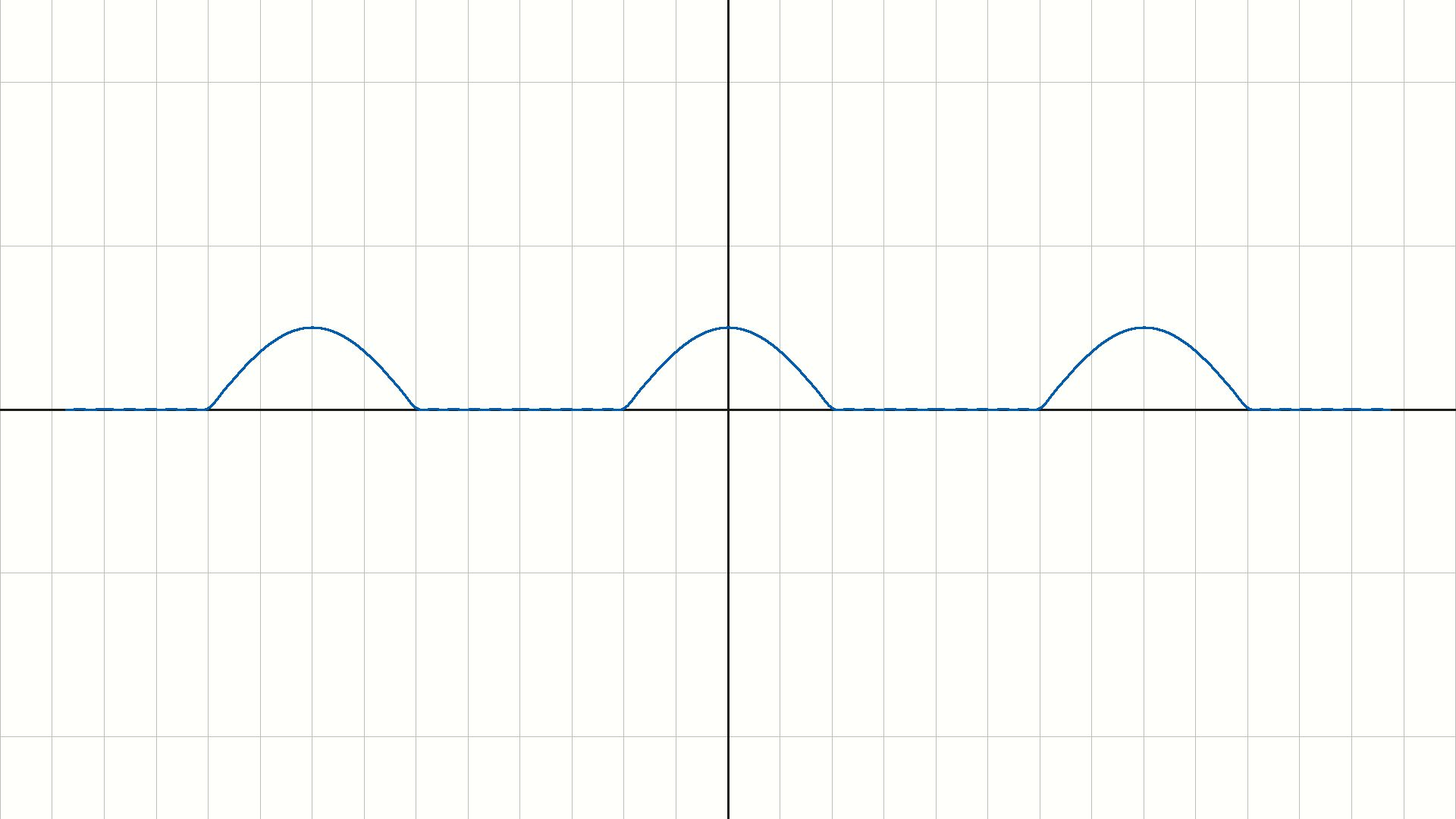
\(0.2\text{Hz}\)采样滤波后频域图像:
\(0.5\text{Hz}\)采样滤波后频域图像:
\(1\text{Hz}\)采样滤波后频域图像:
各时域图像
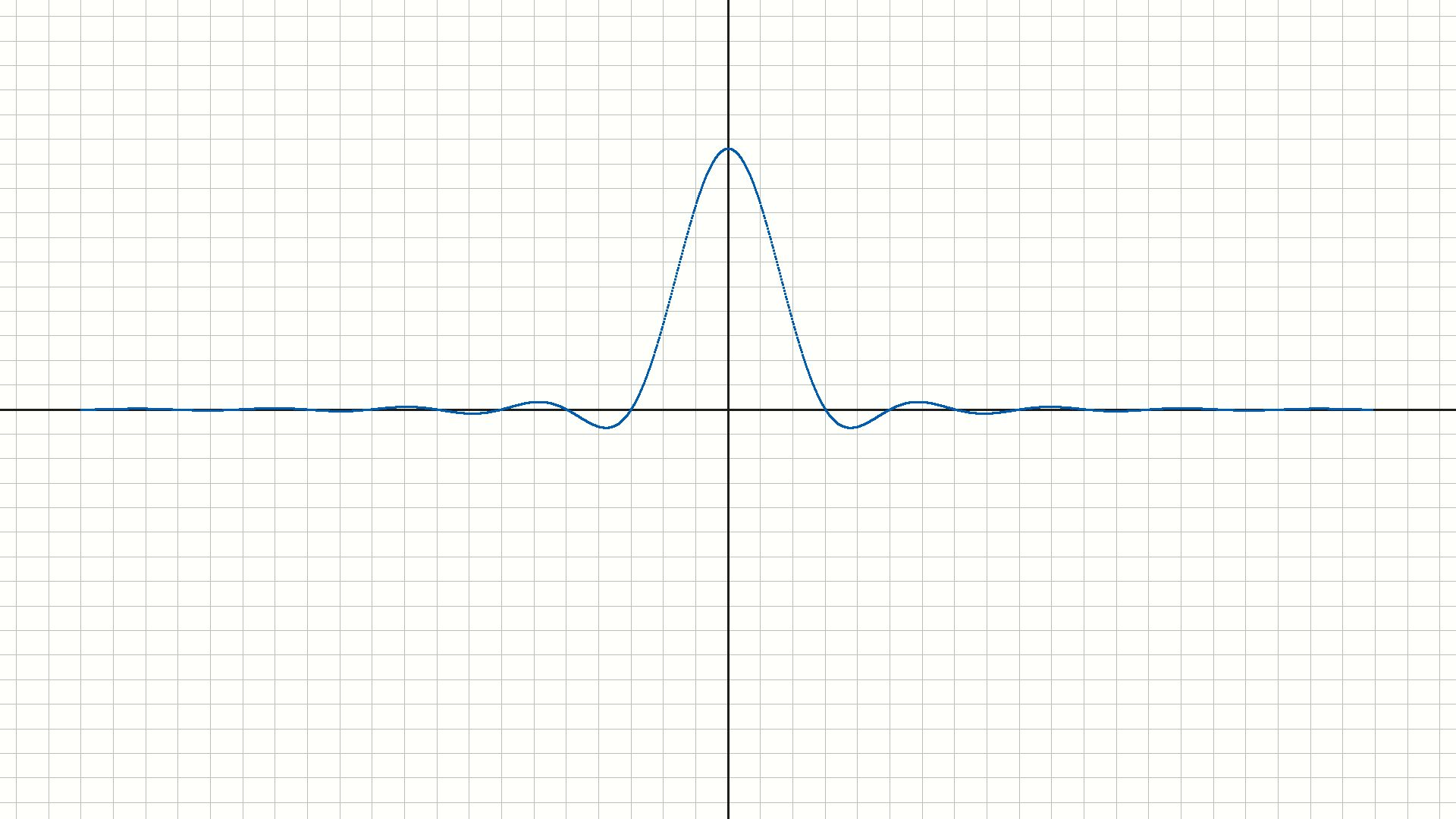
\(F(\omega)\)傅里叶反变换后时域图像:
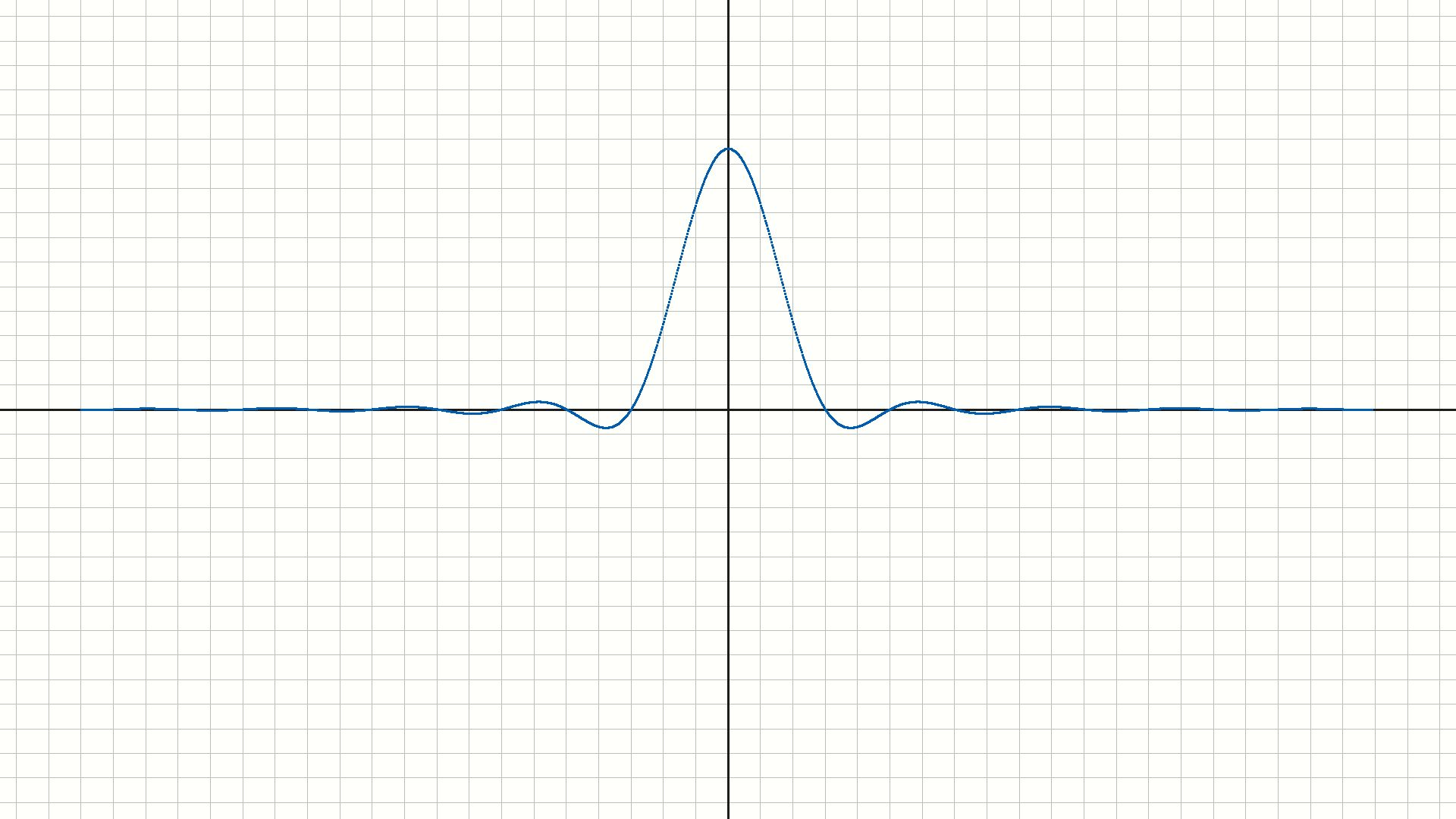
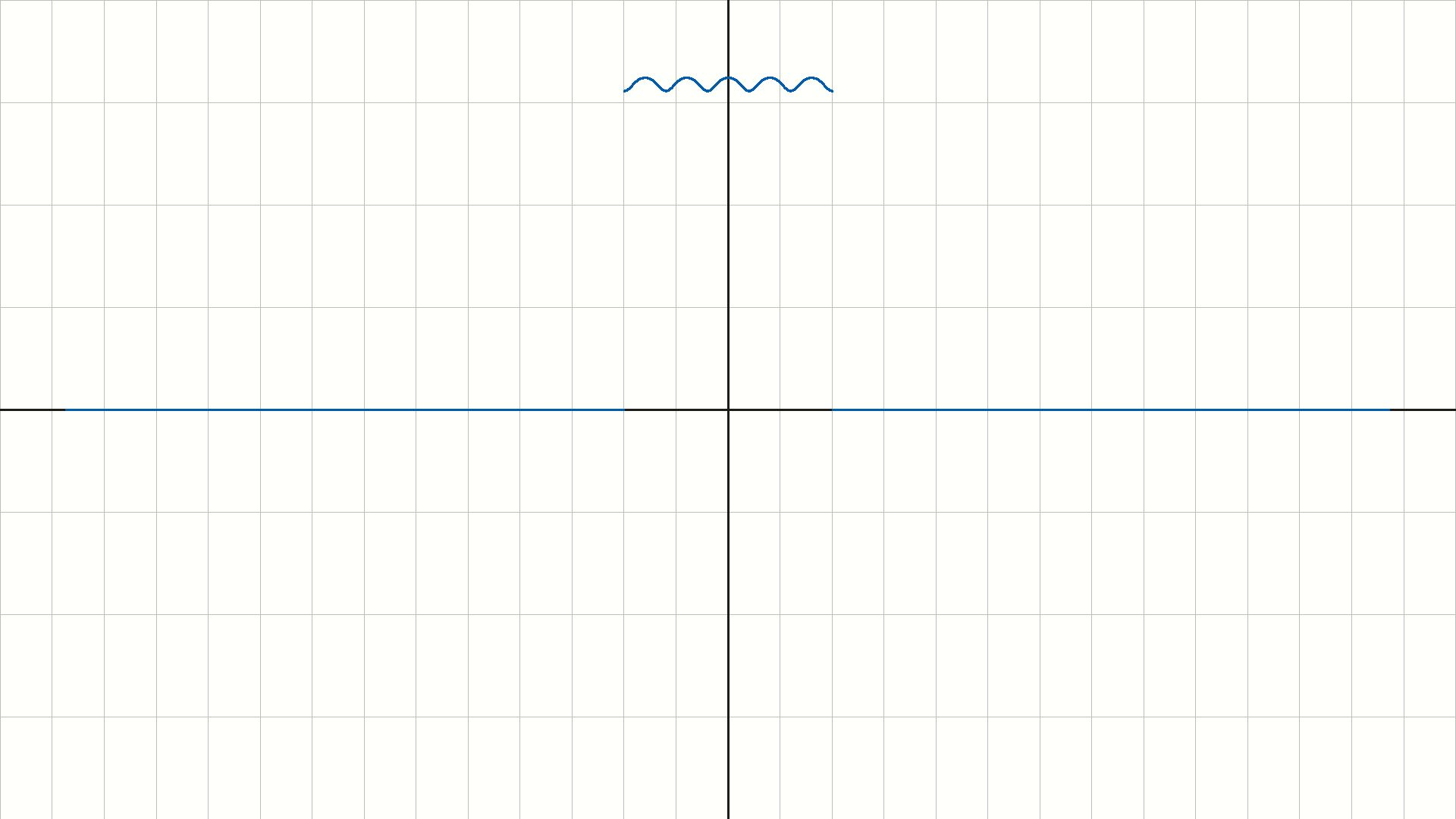
\(0.2\text{Hz}\)采样滤波后恢复的时域图像
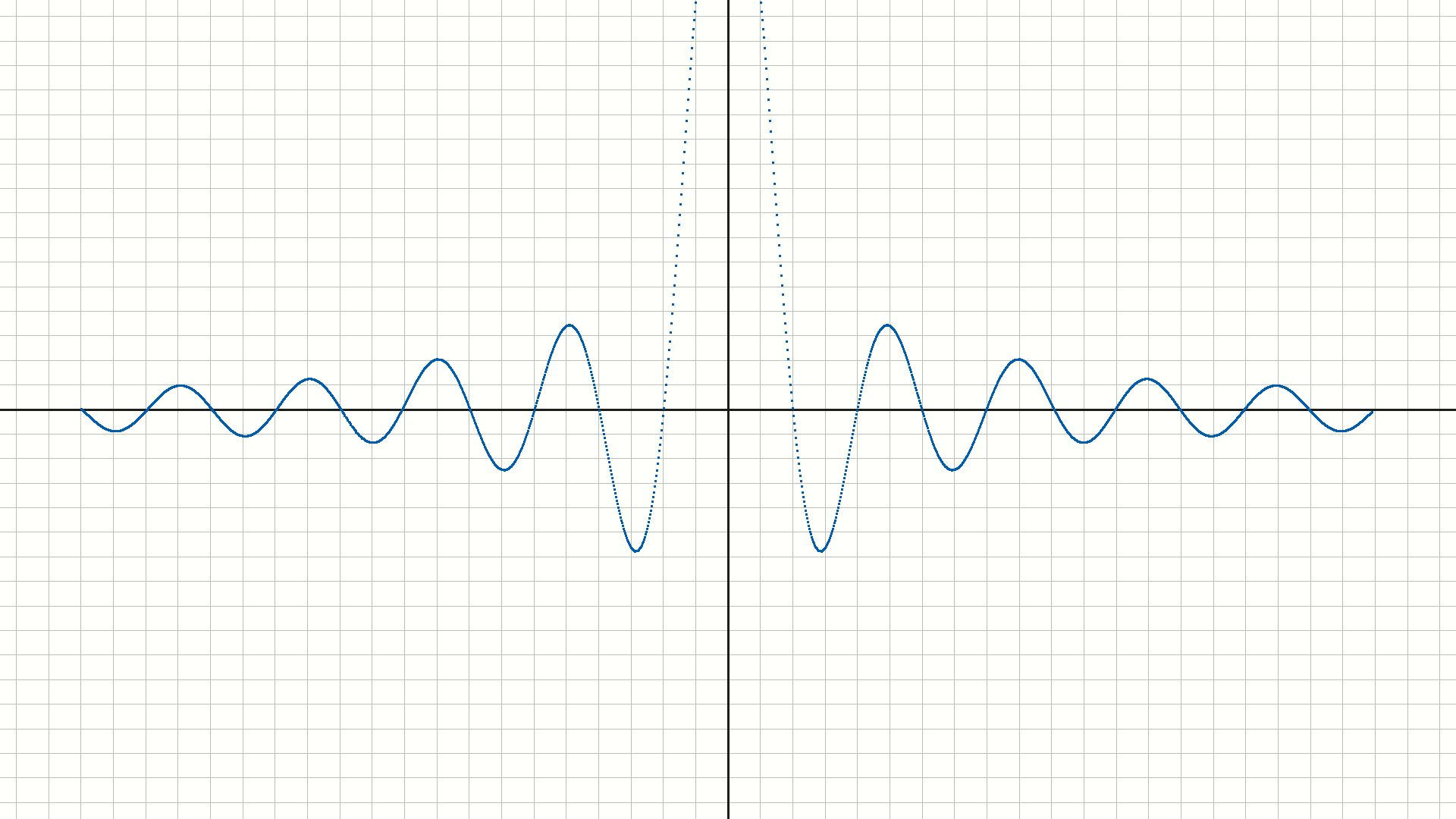
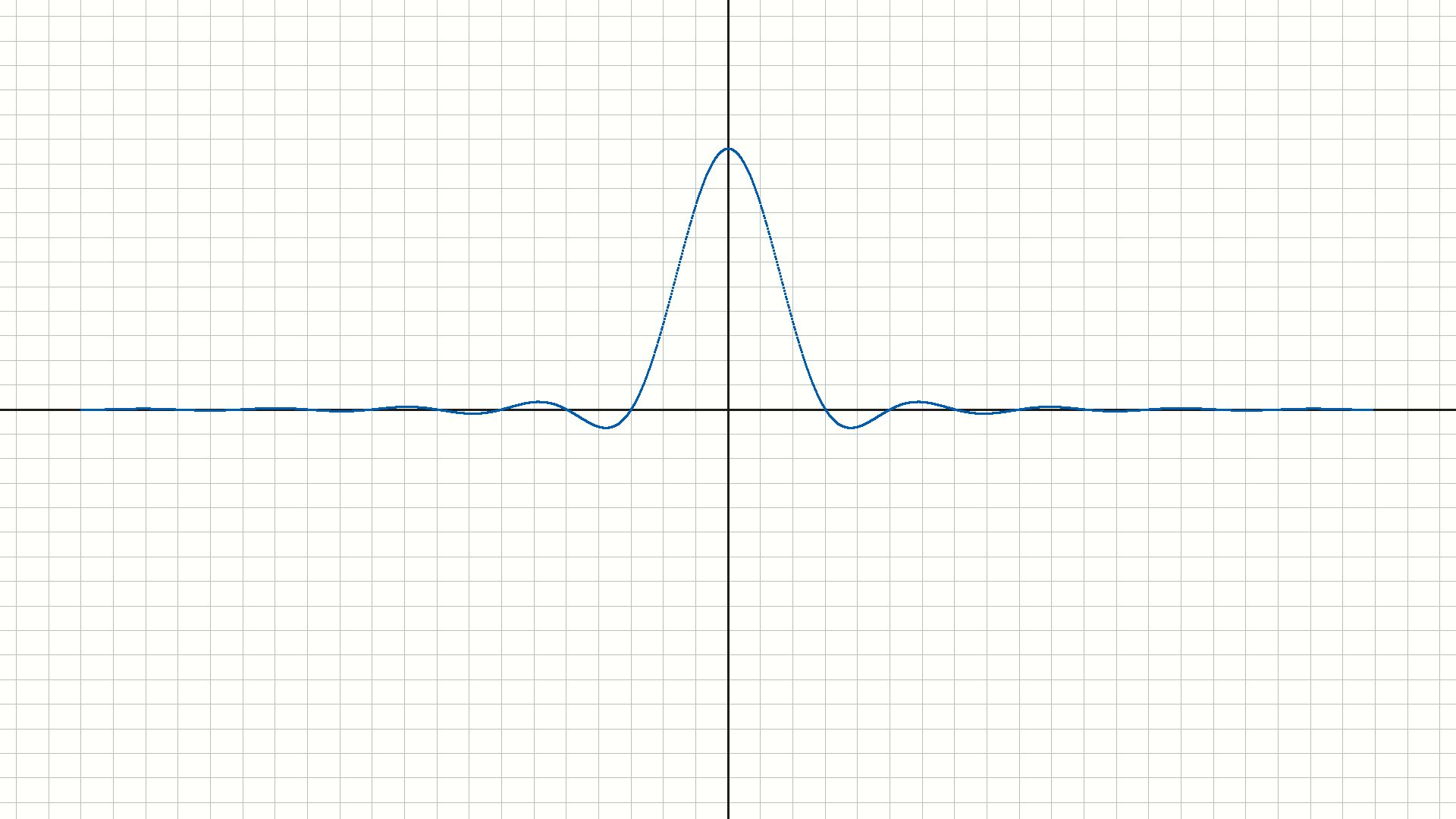
\(0.5\text{Hz}\)采样滤波后恢复的时域图像:
\(1\text{Hz}\)采样滤波后恢复的时域图像
二、实验结果分析
由奈奎斯特抽样定理,一个带限信号\(f(t)\),如果其频谱存在在频域(角频率)区间\([-\omega_m,\omega_m]\),则可用抽样值唯一表示\(f(t)\),抽样值的间隔不能大于\(T_s=\frac{1}{2f_m}\),其中\(f_m=\frac{\omega_m}{2\pi}\).
在本实验中,\(\omega_m=\frac \pi2\),即采样的频率需要达到\(2\frac{\omega_m}{2\pi}=0.5\text{Hz}\)。所以\(0.5\text{Hz}\)和\(1\text{Hz}\)采样后可以恢复,而\(0.2\text{Hz}\)采样后就不能恢复出原来的波形。
三、实验代码
实验用代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118#include "arrayToPPM.h"
#define maxn 5005
const double eps = 1e-11;
const double PI = 3.1415926535;
typedef double (*fun_p)(double);
double F(double omega) {
return ((omega >= -0.5 * PI && omega <= 0.5 * PI) ? cos(omega) : 0);
}
double fourierTransform(double w, fun_p f, double left, double right, double step) {
double ans = 0.0;
for (double t = left; t <= right; t += step) {
ans = ans + f(t) * cos(w * t) * step;
}
return ans;
}
double fourierInvTransform(double t, fun_p f, double left, double right, double step) {
double ans = 0.0;
for (double w = left; w <= right; w += step) {
ans = ans + f(w) * cos(w * t) * step;
}
return ans / (2.0 * PI);
}
double sample(double t, double fre, double tau) { //时域矩形抽样函数
double clc = 1.0 / fre;
t = fabs(t);
double res = fmod(t, clc);
if (res > (clc / 2.0)) res -= clc;
return (fabs(res) <= (tau / 2.0) ? 1.0 : 0.0);
}
double filter(double w, double fre, double tau) {
if (w >= -PI / 2.0 && w <= PI / 2.0)
return (1.0 / fre) / tau;
else
return 0.0;
}
int main() {
double t[maxn], ft[maxn];
PPMdata **matrix;
int cnt = 0;
double w[maxn], Fw[maxn];
for (double w0 = -0.5 * PI - 0.5; w0 <= 0.5 * PI + 0.5; w0 += 0.01) {
w[cnt] = w0;
Fw[cnt] = F(w0);
++cnt;
}
arrayToPPM("out1.ppm", matrix, w, Fw, 1920, 1080, cnt, 0, 0, 3 * PI, 3, PI / 4.0, 0.5);
printf("------task 1 finished------\n");
cnt = 0;
for (double t0 = -20.0; t0 <= 20.0; t0 += 0.1) {
t[cnt] = t0;
ft[cnt] = fourierInvTransform(t0, F, -0.5 * PI - 0.5, 0.5 * PI + 0.5, 0.001);
++cnt;
}
arrayToPPM("out2.ppm", matrix, t, ft, 1920, 1080, cnt, 0, 0, 45, 1, 1, 0.03);
printf("------task 2 finished------\n");
double Fw_2[maxn], Fw_5[maxn], Fw_10[maxn];
cnt = 0;
for (double w0 = -10.0; w0 <= 10.0; w0 += 0.01) {
int j = 0;
for (double i = -20.0; i <= 20.0; i += 0.1) { //计算傅里叶积分
Fw_2[cnt] += cos(w0 * i) * ft[j] * sample(i, 0.2, 0.01) * 0.01;
Fw_5[cnt] += cos(w0 * i) * ft[j] * sample(i, 0.5, 0.01) * 0.01;
Fw_10[cnt] += cos(w0 * i) * ft[j] * sample(i, 1.0, 0.01) * 0.01;
++j;
}
w[cnt] = w0;
++cnt;
}
arrayToPPM("out3_1.ppm", matrix, w, Fw_2, 1920, 1080, cnt, 0, 0, 22, 0.1, PI / 4.0, 0.02);
arrayToPPM("out3_2.ppm", matrix, w, Fw_5, 1920, 1080, cnt, 0, 0, 22, 0.1, PI / 4.0, 0.02);
arrayToPPM("out3_3.ppm", matrix, w, Fw_10, 1920, 1080, cnt, 0, 0, 22, 0.1, PI / 4.0, 0.02);
printf("------task 3 finished------\n");
double Fw2_fil[maxn], Fw5_fil[maxn], Fw10_fil[maxn];
cnt = 0;
for (double w0 = -10.0; w0 <= 10.0; w0 += 0.01) {
Fw2_fil[cnt] = Fw_2[cnt] * filter(w0, 0.2, 0.01);
Fw5_fil[cnt] = Fw_5[cnt] * filter(w0, 0.5, 0.01);
Fw10_fil[cnt] = Fw_10[cnt] * filter(w0, 1.0, 0.01);
++cnt;
}
arrayToPPM("out4_1.ppm", matrix, w, Fw2_fil, 1920, 1080, cnt, 0, 0, 22, 4, PI / 4.0, 0.5);
arrayToPPM("out4_2.ppm", matrix, w, Fw5_fil, 1920, 1080, cnt, 0, 0, 22, 4, PI / 4.0, 0.5);
arrayToPPM("out4_3.ppm", matrix, w, Fw10_fil, 1920, 1080, cnt, 0, 0, 22, 4, PI / 4.0, 0.5);
cnt = 0;
double ft_2[maxn], ft_5[maxn], ft_10[maxn];
for (double t0 = -20.0; t0 <= 20.0; t0 += 0.1) {
int j = 0;
for (double w0 = -10.0; w0 <= 10.0; w0 += 0.01) {
ft_2[cnt] += cos(w0 * t0) * Fw2_fil[j] * 0.01;
ft_5[cnt] += cos(w0 * t0) * Fw5_fil[j] * 0.01;
ft_10[cnt] += cos(w0 * t0) * Fw10_fil[j] * 0.01;
++j;
}
ft_2[cnt] /= (2.0 * PI);
ft_5[cnt] /= (2.0 * PI);
ft_10[cnt] /= (2.0 * PI);
++cnt;
}
arrayToPPM("out4-4.ppm", matrix, t, ft_2, 1920, 1080, cnt, 0, 0, 45, 1, 1, 0.03);
arrayToPPM("out4-5.ppm", matrix, t, ft_5, 1920, 1080, cnt, 0, 0, 45, 1, 1, 0.03);
arrayToPPM("out4-6.ppm", matrix, t, ft_10, 1920, 1080, cnt, 0, 0, 45, 1, 1, 0.03);
return 0;
}其中的
arratToPPM.h是本人编写的绘图用代码库。文件内容为:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178#include "stdio.h"
#include "stdlib.h"
#include "string.h"
#include "math.h"
#define INF 999999999
#define linerFunc(x1,y1,x2,y2,x) ((x-x1)*(y2-y1)/(x2-x1)+y1)
typedef struct {
int r, g, b;
} PPMdata;
int arrayToPPM(char *name,
PPMdata **matrix,
const double *x,
double *y,
int width,
int height,
int arrayLen,
double centerX,
double centerY,
double rangeX,
double rangeY,
double gridX,
double gridY);
PPMdata makePPMdata(int r, int g, int b);
int numToMatPos(double num, double center, double range, double picLen);
void drawMatrix(PPMdata **matrix, int width, int height, int x, int y, PPMdata color);
void drawPoint(PPMdata **matrix, int width, int height, int x, int y, PPMdata color, int size);
void matToPPM(char *fileName, PPMdata **matrix, int width, int height);
PPMdata makePPMdata(int r, int g, int b) {
PPMdata ans;
ans.r = r, ans.g = g, ans.b = b;
return ans;
}
int numToMatPos(double num, double center, double range, double picLen) {
return (int)(picLen / 2 + (num - center) / range * picLen);
}
void drawMatrix(PPMdata **matrix, int width, int height, int x, int y, PPMdata color) {
if (x >= width || x < 0 || y >= height || y < 0) return;
else matrix[y][x] = color;
return;
}
void drawPoint(PPMdata **matrix, int width, int height, int x, int y, PPMdata color, int size) {
for (int i = -1 * size; i <= size; ++i) {
for (int j = -1 * size; j <= size; ++j) {
int u = x + i, v = y + j;
if (u >= width || u < 0 || v >= height || v < 0) return;
else matrix[v][u] = color;
}
}
}
void matToPPM(char *fileName, PPMdata **matrix, int width, int height) {
freopen(fileName, "w", stdout);
printf("P3\n");
printf("%d %d\n", width, height);
printf("255\n");
for (int i = 0; i < height; ++i) {
for (int j = 0; j < width; ++j) {
printf("%d %d %d", matrix[i][j].r, matrix[i][j].g, matrix[i][j].b);
printf(" ");
}
printf("\n");
}
fclose(stdout);
freopen("CON", "w", stdout);
return;
}
int arrayToPPM(char *name,
PPMdata **matrix,
const double *x,
double *y,
int width,
int height,
int arrayLen,
double centerX,
double centerY,
double rangeX,
double rangeY,
double gridX,
double gridY) {
matrix = (PPMdata **) malloc(sizeof(PPMdata *) * height);
for (int i = 0; i < height; i++) {
matrix[i] = (PPMdata *) calloc(width, sizeof(PPMdata));
}
if (height % 2) ++height;
if (width % 2) ++width;
double *y_save=(double*)malloc(sizeof(double)*(arrayLen+2));
for(int i=0;i<arrayLen;++i) y_save[i]=y[i];
for (int i = 0; i < arrayLen; ++i) {
y[i] = centerY - (y[i] - centerY);
}
for (int i = 0; i < arrayLen; ++i) {
if (x[i] < x[i - 1] && i >= 1) {
fprintf(stderr, "ERROR:X is not increasing.\n");
return -1;
}
if (!(x[i] > centerX - (rangeX / 2.0) && x[i] < centerX + (rangeX / 2.0))) {
fprintf(stderr, "ERROR:X out of range.\n");
return -1;
}
if (!(y[i] > centerY - (rangeY / 2.0) && y[i] < centerY + (rangeY / 2.0))) {
if (y[i] > centerY + (rangeY / 2.0)) y[i] = centerY + (rangeY / 2.0);
if (y[i] < centerY - (rangeY / 2.0)) y[i] = centerY - (rangeY / 2.0);
}
}
PPMdata background, axis, grid, line;
background = makePPMdata(255, 255, 251);
axis = makePPMdata(28, 28, 28);
grid = makePPMdata(189, 192, 186);
line = makePPMdata(0, 92, 175);
for (int i = 0; i < height; ++i) {
for (int j = 0; j < width; ++j) {
matrix[i][j] = background;
}
}
for (int i = 0; centerX + i * gridX <= centerX + rangeX / 2; ++i) {
for (int j = 0; j < height; ++j) {
drawPoint(matrix, width, height, numToMatPos(centerX + i * gridX, centerX, rangeX, width), j, grid, 0);
drawPoint(matrix, width, height, numToMatPos(centerX - i * gridX, centerX, rangeX, width), j, grid, 0);
}
}
for (int i = 0; centerY + i * gridY <= centerY + rangeY / 2; ++i) {
for (int j = 0; j < width; ++j) {
drawPoint(matrix, width, height, j, numToMatPos(centerY + i * gridY, centerY, rangeY, height), grid, 0);
drawPoint(matrix, width, height, j, numToMatPos(centerY - i * gridY, centerY, rangeY, height), grid, 0);
}
}
for (int i = 0; i < width; ++i) {
drawPoint(matrix, width, height, i, height / 2, axis, 1);
}
for (int i = 0; i < height; ++i) {
drawPoint(matrix, width, height, width / 2, i, axis, 1);
}
double stepX = rangeX / width;
for (double X = centerX - rangeX / 2; X < centerX + rangeX / 2; X += stepX) {
int linerIndex = -1;
for (int i = 0; i < arrayLen; ++i) {
if (X < x[i]) {
linerIndex = i - 1;
break;
}
}
if (linerIndex == -1) {
continue;
} else {
double u, v, Y;
u = numToMatPos(X, centerX, rangeX, width);
Y = linerFunc(x[linerIndex], y[linerIndex], x[linerIndex + 1], y[linerIndex + 1], X);
v = numToMatPos(Y, centerY, rangeY, height);
drawPoint(matrix, width, height, u, v, line, 1);
}
}
matToPPM(name, matrix, width, height);
fprintf(stderr, "%s Draw finish!\n",name);
for(int i=0;i<height;++i)
free(matrix[i]);
free(matrix);
for(int i=0;i<arrayLen;++i) y[i]=y_save[i];
return 0;
}
本站的运行成本约为每个月5元人民币,如果您觉得本站有用,欢迎打赏:

信号与系统实验2:信号的矩形脉冲抽样与恢复
https://suzumiyaakizuki.github.io/2022/05/10/信号报告2/